Roboticist, etc.

Fetch Robotics (2014-2017)
As CTO, I led the design and implementation of software and electronics
for Fetch and Freight robots. These platforms won the Material Handling
Institute (MHI) Best New Innovation Award at MODEX 2016.
I was a major contributor to a number of software milestones including
the development of key firmware components, secure bootloaders, hand-eye
calibration, and high-level demonistrations of mobility and manipulation
that are still part of the research product.

Unbounded Robotics (2013-2014)
As CTO, I led the design of the software and electrical system of the
UBR-1 robot platform.
Unbounded didn't make it past the seed round, but we did release
some code on GitHub.
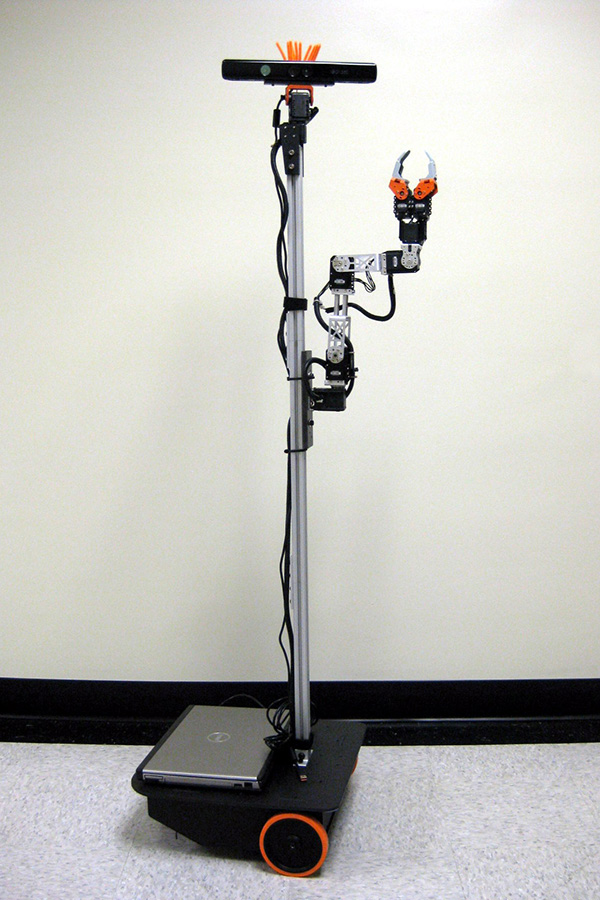
Maxwell (2010)
Maxwell is a low-cost mobile manipulator I built as part of my master's thesis.
Maxwell won the 2011 AAAI Small Scall Manipulation Challenge. I've made a
number of blog posts
and a RoboGames paper detailing Maxwell.

Mini Max (2011)
A miniature version of Maxwell. A set of these were built for Siena
College. The arm eventually became the "Turtlebot Arm".
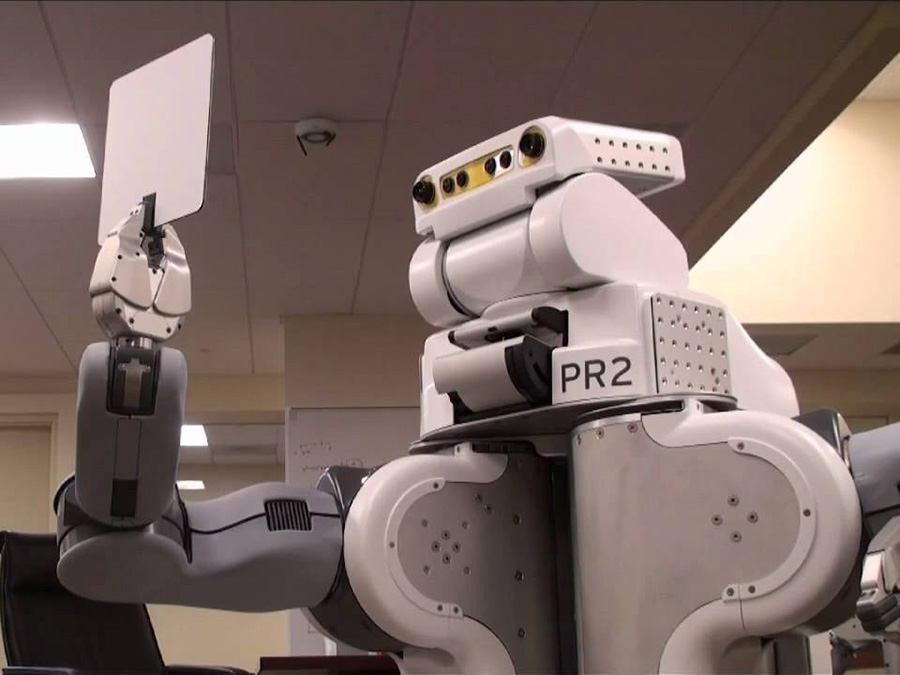
Calibration
Calibration has been an interest of mine for some time. While at Willow
Garage I worked on a generic port of the pr2_calibration stack, making
it easier for many robots to find their arms. The
calibration
stack has been used on robots ranging from Maxwell, to PR2, to robots as
part of the ROS-Industrial project.
While at Unbounded Robotics and Fetch Robotics, I worked on a completely new
robot_calibration
project. This new system is significantly faster and more robust.

PR-MINI (2010)
The overly complex predecessor to Maxwell. Designed as a 60% scale version
of the PR2 using Dynamixel servos. See more in
this blog post.

SMALdog (2009-2014)
SMALdog is "Sorta-Maybe-Almost-Littledog", a small walking robot platform.
The original version used the Arbotix and was able do simple things like
jump.
A later version has been developed using my Ethbridge board and ROS. The
code I developed is on GitHub.

XR-B3 (2008)
Xr-B3 was my last table-top sized mapping robot. The small memory size (2k of ram)
required the metric map be only be a small rolling window (about 6ft x 6ft). A
topological map was then extracted from the metric map. The sensor update algorithm
was based on Histogram In-Motion Mapping (HIMM).

Armadillo (2010)
The Armadillo was a short-lived ArbotiX-based mobile manipulator. It's
small base weventually was upsized into Maxwell. The ArbotiX-ROS interface
code eventually became the basis of the modern
Arbotix ROS wrappers.
While Armadillo never did much manipulation, it
produce a number of maps.
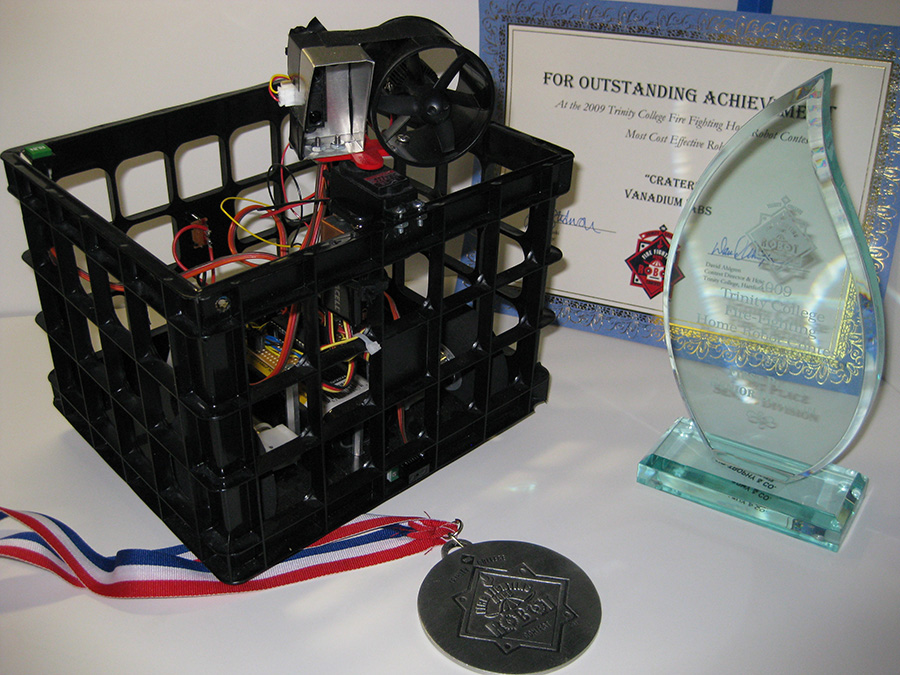
Crater (2009)
This stupid little $118 robot is the prime example of why you should Keep It Simple Stupid.
Intended only to compete in the "low-cost award" category, Crater won the Non-Kit Senior Division
at the 2009 Trinity College Fire Fighting Home Robot Contest. See more in
this blog post,
code on github, and
tutorials
I wrote.
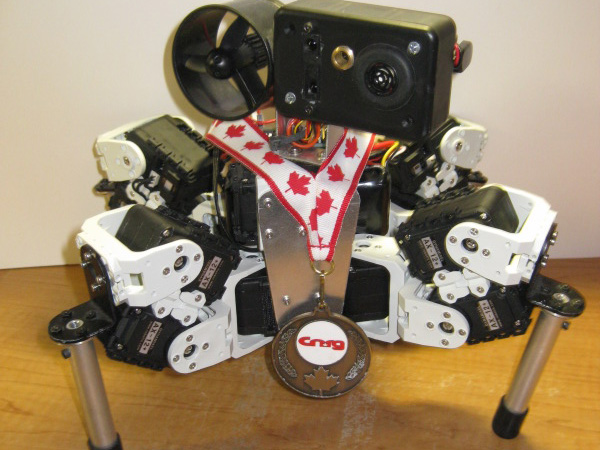
Issy (2009-2011)
Issy was a small walking robot, with numerous configurations over time.
Issy was built around the original ArbotiX robocontroller and won Gold
in the first Mech Warfare in 2009 and first place in the 2009 Canadian
National Robot Games Walker Challenge. Versions of Issy participated in
everything from Fire Fighting Contests to Mech Warfare. There are a number of
blog posts
on the many versions of Issy.
My later focus with Issy was on dynamic gaits, dynamic balance, and terrain
adaptation of walking gaits. The feet were outfitted with FSR sensors, and
an IMU was integrated.